Time for another stepper motor.
It was too good and opportunity to pass up, at just over £3 I was willing to fail at getting both motors working on the Raspberry Pi
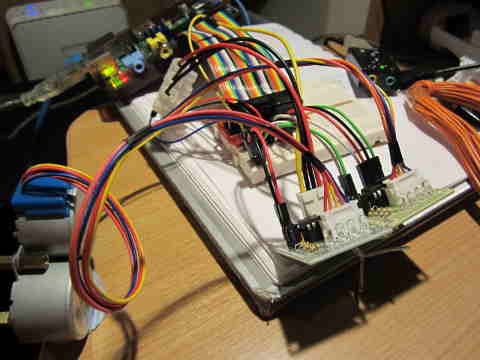
After some careful cable splicing I was ready to try it out. The previous wiring had involved a costly purchase of a set of 8 female to male wires, costing more than the motor. This time I cut up and old floppy disk drive connector and using a small chock-block and some inventive twisting was able to use existing wires.
The biggest problem was going to be if the Pi could power both motors ...
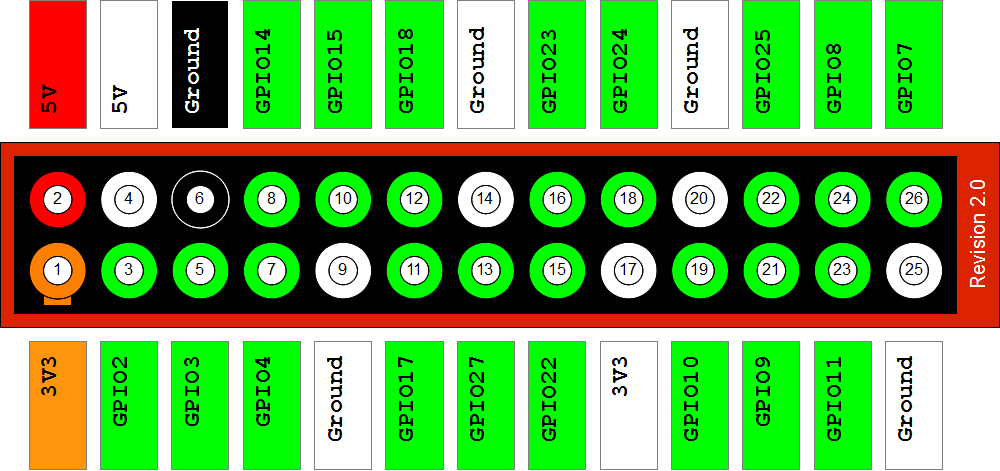
First I identified which extra pins I could use from the Pi Cobbler. I found a large image detailing the GPIO pins 1000x471. The original setup had used 7,8,25,24 which was the first three miss one for ground and then the last one. So I continued down the line with 23(miss one for another ground), 18,15,14. Yes, the numbering convention IS confusing!
Test1: I copied the step.py code from last time and did nothing but change the GPIO pin definitions and ...
It did not work! I got
The excellent raspberrypi stackexchange led me to some 'clean up' code.
Which strangely did not help until I had rebooted. But now the second motor did work as expected, for safety the first motor had had the power removed.
Test2: Reworked the python script to accept the number of steps and direction of each motor, mainly by duplicating blocks of code and Hey Presto! it works. Each motor can be run in an independent direction for an independent number of steps.
Now what to do with them? and can I afford a third/forth? and could the Pi power that many?
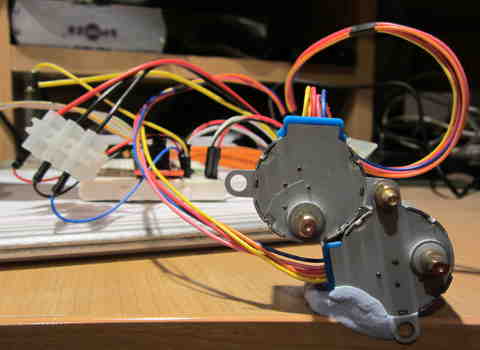
side note: the fixing of the two motors together is done with a couple of motherboard risers, remember those?
It was too good and opportunity to pass up, at just over £3 I was willing to fail at getting both motors working on the Raspberry Pi
After some careful cable splicing I was ready to try it out. The previous wiring had involved a costly purchase of a set of 8 female to male wires, costing more than the motor. This time I cut up and old floppy disk drive connector and using a small chock-block and some inventive twisting was able to use existing wires.
The biggest problem was going to be if the Pi could power both motors ...
First I identified which extra pins I could use from the Pi Cobbler. I found a large image detailing the GPIO pins 1000x471. The original setup had used 7,8,25,24 which was the first three miss one for ground and then the last one. So I continued down the line with 23(miss one for another ground), 18,15,14. Yes, the numbering convention IS confusing!
Test1: I copied the step.py code from last time and did nothing but change the GPIO pin definitions and ...
It did not work! I got
RuntimeWarning: This channel is already in use, continuing anyway. Use GPIO.setwarnings(False) to disable warnings.
GPIO.setup(pin,GPIO.OUT)
The excellent raspberrypi stackexchange led me to some 'clean up' code.
GPIO.cleanup()
Which strangely did not help until I had rebooted. But now the second motor did work as expected, for safety the first motor had had the power removed.
Test2: Reworked the python script to accept the number of steps and direction of each motor, mainly by duplicating blocks of code and Hey Presto! it works. Each motor can be run in an independent direction for an independent number of steps.
# Name: Steptwo.py
#
# Author: Rob Davis
# Based on the Stepper Motor code from matt.hawkins www.raspberrypi-spy.co.uk/2012/07/stepper-motor-control-in-python/
#
# Created: 2014/03/12
#
# Takes parameters for number of steps and which direction for each motor from the command line.
# e.g.
# sudo python step.py 4100 CCW 2050 CW
# To operate motor 1 for 4100 steps (a complete revolution) in a counter clockwise direction and at the same time turn motor 2 in a Clockwise direct for 2050 steps (180 degrees).
#-----------------------------------
#!/usr/bin/env python
# Import required libraries
import sys
import time
import RPi.GPIO as GPIO
# Use BCM GPIO references
# instead of physical pin numbers
GPIO.setmode(GPIO.BCM)
# Define GPIO signals to use
# GPIO24,GPIO25,GPIO8,GPIO7
StepPins1 = [24,25,8,7] # CW rotation
if (sys.argv[2]=="CCW") :
StepPins1 = [7,8,25,24] # CCW rotation
StepPins2 = [14,15,18,23] # CW rotation
if (sys.argv[4]=="CCW") :
StepPins2 = [23,18,15,14] # CCW rotation
# Set all pins as output
for pin in StepPins1:
# print "Setup pins"
GPIO.setup(pin,GPIO.OUT)
GPIO.output(pin, False)
for pin in StepPins2:
# print "Setup pins"
GPIO.setup(pin,GPIO.OUT)
GPIO.output(pin, False)
# Define some settings
StepCounter = 0
WaitTime = 0.01
# Define simple sequence
StepCount1 = 4
Seq1 = []
Seq1 = range(0, StepCount1)
Seq1[0] = [1,0,0,0]
Seq1[1] = [0,1,0,0]
Seq1[2] = [0,0,1,0]
Seq1[3] = [0,0,0,1]
# Define advanced sequence
# as shown in manufacturers datasheet
StepCount2 = 8
Seq2 = []
Seq2 = range(0, StepCount2)
Seq2[0] = [1,0,0,0]
Seq2[1] = [1,1,0,0]
Seq2[2] = [0,1,0,0]
Seq2[3] = [0,1,1,0]
Seq2[4] = [0,0,1,0]
Seq2[5] = [0,0,1,1]
Seq2[6] = [0,0,0,1]
Seq2[7] = [1,0,0,1]
# Choose a sequence to use
Seq = Seq1
StepCount = StepCount1
Seq = Seq2
StepCount = StepCount2
# Start main loop
steps1 = int(sys.argv[1])
steps2 = int(sys.argv[3])
stepc = 0
while (stepc<=steps1) or (stepc<=steps2):
if (stepc<=steps1):
print "Step %i of %i" %(stepc,steps1)
if (stepc<=steps2):
print "Step %i of %i" %(stepc,steps2)
for pin in range(0, 4):
if (stepc<=steps1):
xpin1 = StepPins1[pin]
if Seq[StepCounter][pin]!=0:
# print " Step %i Enable %i" %(StepCounter,xpin1)
GPIO.output(xpin1, True)
else:
GPIO.output(xpin1, False)
if (stepc<=steps2):
xpin2 = StepPins2[pin]
if Seq[StepCounter][pin]!=0:
# print " Step %i Enable %i" %(StepCounter,xpin2)
GPIO.output(xpin2, True)
else:
GPIO.output(xpin2, False)
StepCounter += 1
# If we reach the end of the sequence
# start again
if (StepCounter==StepCount):
StepCounter = 0
if (StepCounter<0):
StepCounter = StepCount
# Wait before moving on
time.sleep(WaitTime)
stepc+=1
GPIO.cleanup()
Now what to do with them? and can I afford a third/forth? and could the Pi power that many?
side note: the fixing of the two motors together is done with a couple of motherboard risers, remember those?




![[Pay4Foss banner long]](http://pay4foss.org/pay4foss_bar.png)
{kind=link}