In amongst the
stuff I got from Amazon was stepper motor and an LCD panel. I have not looked at the LCD panel yet so its time to dig into the stepper motor.
I went for the cheapest option at £3.21
28BYJ-48 28BYJ48 DC 5V 4-Phase 5-Wire Arduino Stepper Motor with ULN2003 Driver Board
Stepper motors are quite simple once you have them working but with no idea what I was doing I was very happy to find a number of Pi enthusiast had been there before.
Main tutorial I followed
more hardcore, glad I did not need
yet another
alternative driver board
cheap driver board kit for two motors
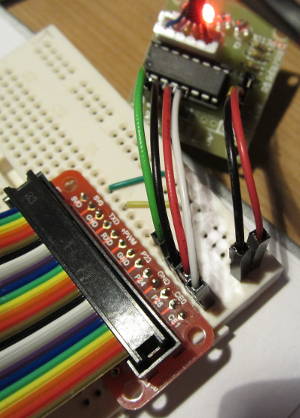
Each tutorial author had decided on a different set of GPIO pins but
this one had them all nicely grouped at one end. See my build photo at the end of this post.
I spent some time with this
tutorial trying to get all the pins correct. But when I ran the python code the motor did not turn, strangely the LEDs turned on and off in sequence. The four LEDs light when the four electro magnets are enabled,
wikipedia explains with a nice animation.
Fearing the worst I turned to
stackoverflow where someone else had experienced the same(?) problem. Their main culprit was the power supply.
Just about to bin the whole thing as "cheap rubbish" I picked up the motor while the code was running. To my surprise the metal cylinder had a heartbeat. A small vibration each time the LEDs changed, which was every half a second. Intrigued, I started to dig more into stepper motors and found I could almost imperceptibly feel the motor ever so slowly ticking round.
By changing the delay in the code I could make the motor turn faster. At a 0.001 delay the motor whizzed round in 8.5 seconds. But it would sometimes get stuck.
In the code was an alternate pattern for calling the outputs, labelled "manufacturers datasheet". Changing to this greatly improved the reliability and I had no more "stalls"
I set about trying to find out how many "steps" were required to complete a 360 degree revolution. I found I had to change my delay from 0.001 to 0.01 or it would seem to skip steps and create non-reproducible actions. The first value 100 moved the arm hardly at all, the second 1000 seemed to be an exact quarter, but 4000 was not quite a full circuit.
Trial and error lead me to 4100 and I found I could run my code repeating 4100 steps clockwise and then 4100 steps counter clockwise over and over again (main test was eight times) and the arm would always end up in the exact same place. It turns out that the 4100 figure is because the motor has 64 ratio gearing and if you want to get technical the correct value is 4100.22.
#-----------------------------------
# Name: Step.py
#
# Author: Rob Davis
# Based on the Stepper Motor code from matt.hawkins www.raspberrypi-spy.co.uk/2012/07/stepper-motor-control-in-python/
#
# Created: 2014/02/09
#
# Takes parameters for number of steps and which direction from the command line.
# e.g.
# sudo python step.py 4100 CCW
# To operate the motor for 4100 steps (a complete revolution) in a counter clockwise direction.
#-----------------------------------
#!/usr/bin/env python
import sys
import time
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
# Define GPIO signals to use
# Pins 18,22,24,26
# GPIO24,GPIO25,GPIO8,GPIO7
StepPins = [24,25,8,7] # CW rotation
if (sys.argv[2]=="CCW") :
StepPins = [7,8,25,24] # CCW rotation
# Set all pins as output
for pin in StepPins:
GPIO.setup(pin,GPIO.OUT)
GPIO.output(pin, False)
# Define some settings
StepCounter = 0
WaitTime = 0.01
# Define simple sequence (do not use)
StepCount1 = 4
Seq1 = []
Seq1 = range(0, StepCount1)
Seq1[0] = [1,0,0,0]
Seq1[1] = [0,1,0,0]
Seq1[2] = [0,0,1,0]
Seq1[3] = [0,0,0,1]
# Define advanced sequence as shown in manufacturers datasheet
StepCount2 = 8
Seq2 = []
Seq2 = range(0, StepCount2)
Seq2[0] = [1,0,0,0]
Seq2[1] = [1,1,0,0]
Seq2[2] = [0,1,0,0]
Seq2[3] = [0,1,1,0]
Seq2[4] = [0,0,1,0]
Seq2[5] = [0,0,1,1]
Seq2[6] = [0,0,0,1]
Seq2[7] = [1,0,0,1]
Seq = Seq2
StepCount = StepCount2
# Start main loop
steps = int(sys.argv[1])
stepc = 0
while stepc<=steps:
print "Step %i of %i" %(stepc,steps)
for pin in range(0, 4):
xpin = StepPins[pin]
if Seq[StepCounter][pin]!=0:
GPIO.output(xpin, True)
else:
GPIO.output(xpin, False)
StepCounter += 1
# If we reach the end of the sequence start again
if (StepCounter==StepCount):
StepCounter = 0
if (StepCounter<0):
StepCounter = StepCount
# Delay to allow electro magnets to align the gear wheel
time.sleep(WaitTime)
stepc+=1
You can see the Pi wired up with my
cobbler, a bread board and the stepper motor driver.
The arm was a piece of plastic toy I found in the bin. It has bit of cardboard wedged in the hole to keep it tight.

Here is a close up of the wiring.






![[Pay4Foss banner long]](http://pay4foss.org/pay4foss_bar.png)